Co-founder & CEO
Novara Robotics
Building the next generation of robotics infrastructure.
Building Novara Robotics
MS Robotics @ UPenn
Hey! I'm Saayuj, a robotics engineer working on getting robots to actually work in the real world.
I'm currently pursuing my Master's in Robotics at UPenn and did my Bachelor's with Honors in Mechanical Engineering from IIT Bombay. Whether it's teaching robot arms to handle objects safely or building simulations that match reality, I focus on bridging the gap between theory and deployment. This passion led me to start my own company, Novara Robotics (more to come soon!).
Outside of my startup and coursework, I'm either at the gym, playing tennis, or playing poker.

Building the next generation of robotics infrastructure.
Developed safe contact control frameworks for robotic manipulation.
Improved simulation fidelity for robotic manipulation tasks.
Reduced robotic manipulator oscillations through advanced control techniques.
Optimized drone delivery logistics using operations research methods.
Designed control algorithms for snake-like robotic locomotion.
Validated automotive ECU systems and improved testing efficiency.

Robots trained in simulation often fail in the real world due to physics mismatches. Optimized simulation physics parameters to minimize the sim-to-real gap and built photorealistic simulation environments for more accurate training. Deployed vision-language models on real robot arms to validate the approach, enabling faster iteration between simulation and physical deployment.
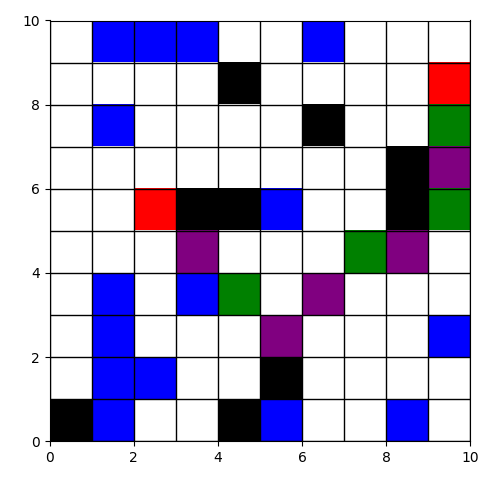
Robots waste time recalculating entire plans when small changes occur. Created a smart replanning system that only fixes the affected parts, reducing computation time by orders of magnitude and enabling robots to work safely in changing environments.
Drone delivery networks struggle with limited battery range and inefficient charging infrastructure placement. Formulated mixed-integer programming models to optimize charging station locations and generate battery-constrained flight paths for multi-drone fleets. Achieved minimal delivery times while respecting energy limitations across multiple warehouses and delivery zones.

Autonomous mobile robots must navigate safely in real-time while avoiding dynamic obstacles. Built a complete perception and control system with LiDAR-based SLAM, RRT* for real-time path planning, and deployed YOLO + TensorRT for dynamic obstacle detection. Achieved real-time performance on embedded hardware, demonstrating robust navigation in high-speed scenarios.
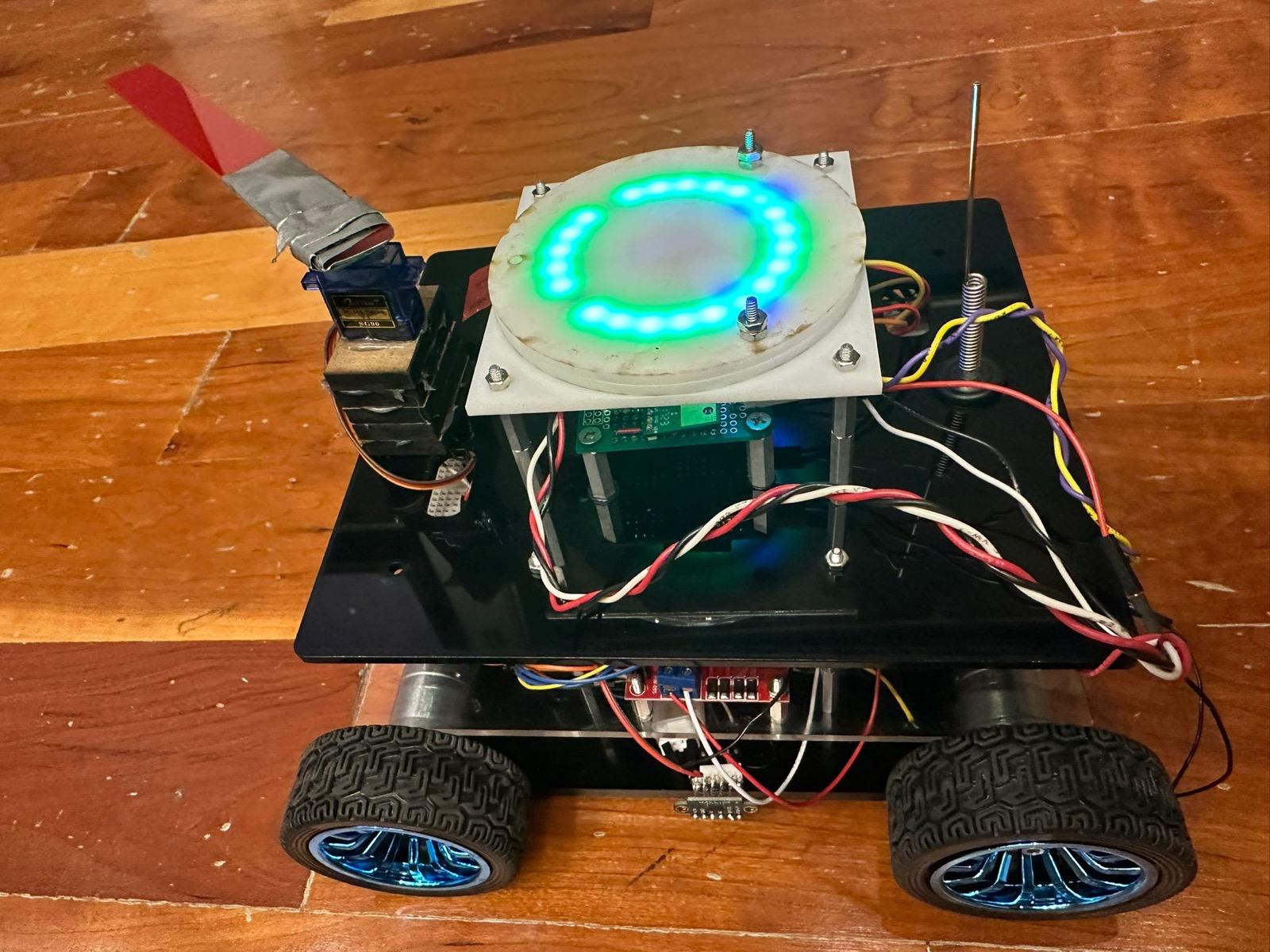
Designed and manufactured a fully autonomous mobile robot from scratch for a robot-war competition. Integrated ESP32 microcontrollers, motor drivers, Time-of-Flight sensors for navigation, and HTC Vive for precision localization. Implemented multi-protocol communication systems for remote control and coordination.

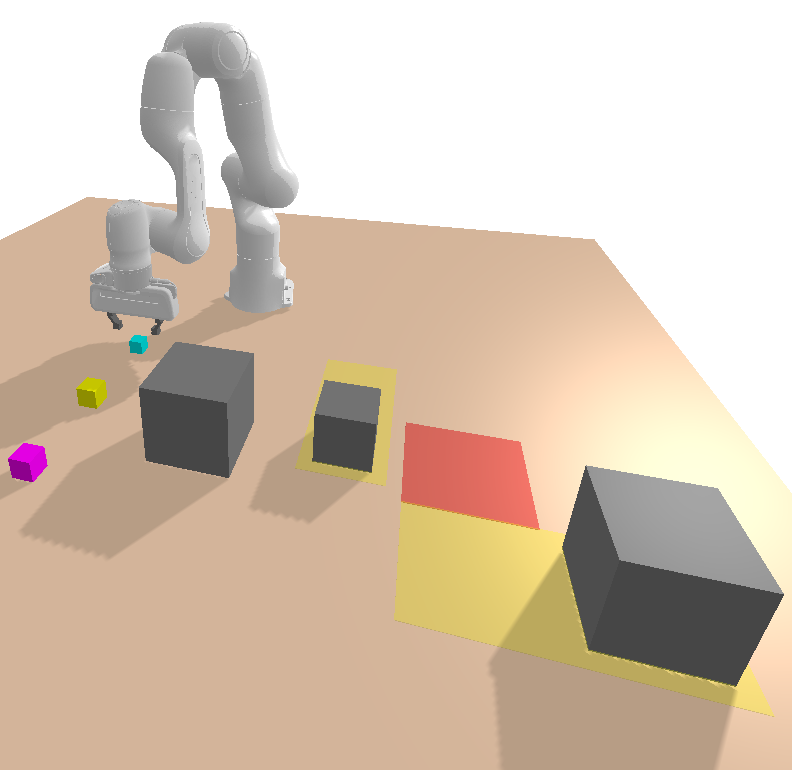
Robotic manipulation requires seamless integration of perception, planning, and control. Built an end-to-end pipeline for a 7-DoF Franka Panda arm including inverse kinematics, motion planning, and trajectory generation. Successfully handled dynamic object manipulation in competitive scenarios with robust block position estimation.
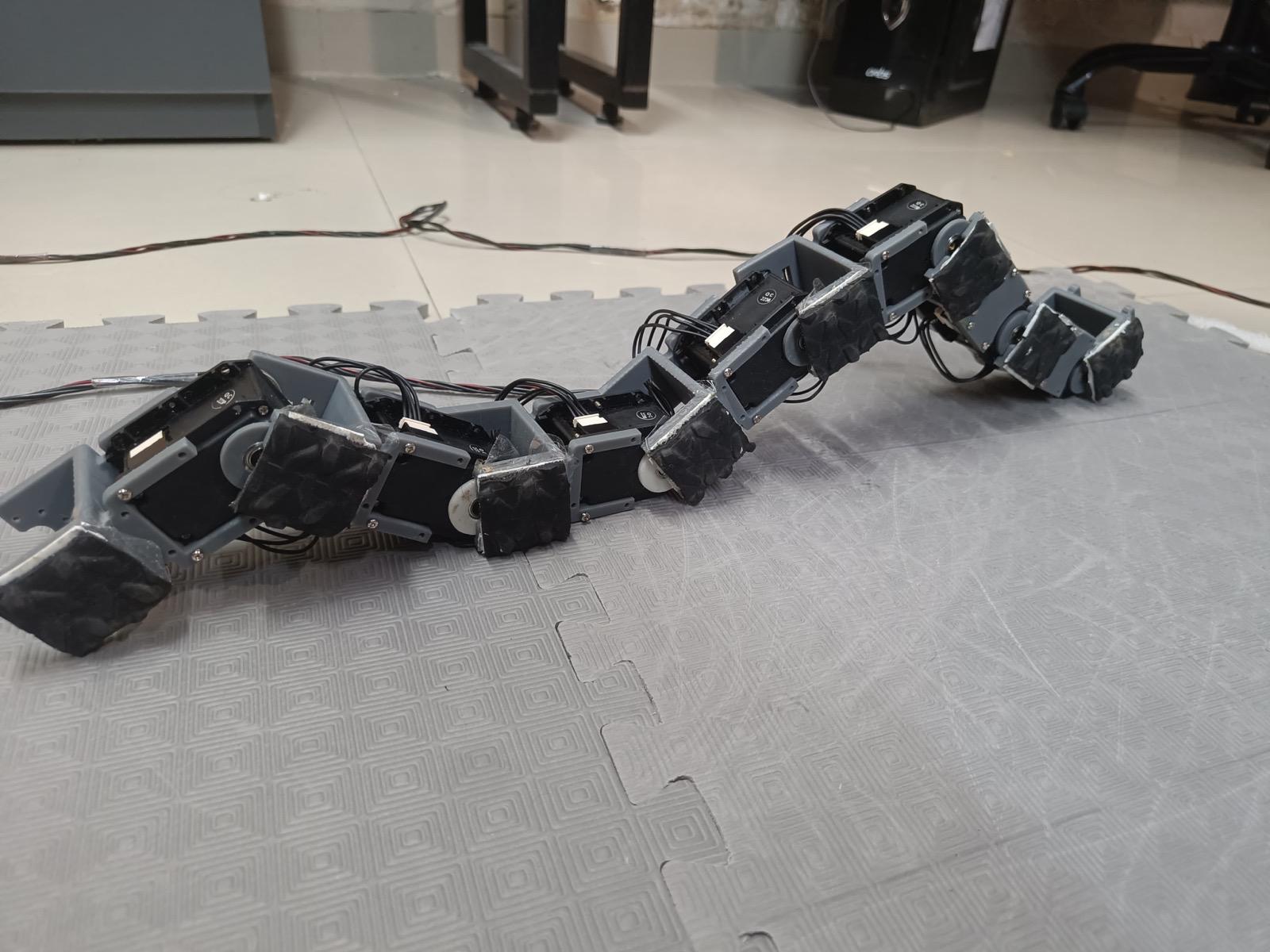
Snake robots require accurate dynamic models that account for friction and structural deflections. Developed a modified dynamic model for our particular robot and built a Simscape-Gazebo co-simulation for a 10-link snake robot with PID control for position tracking. Validated control algorithms through MATLAB and ROS simulation.
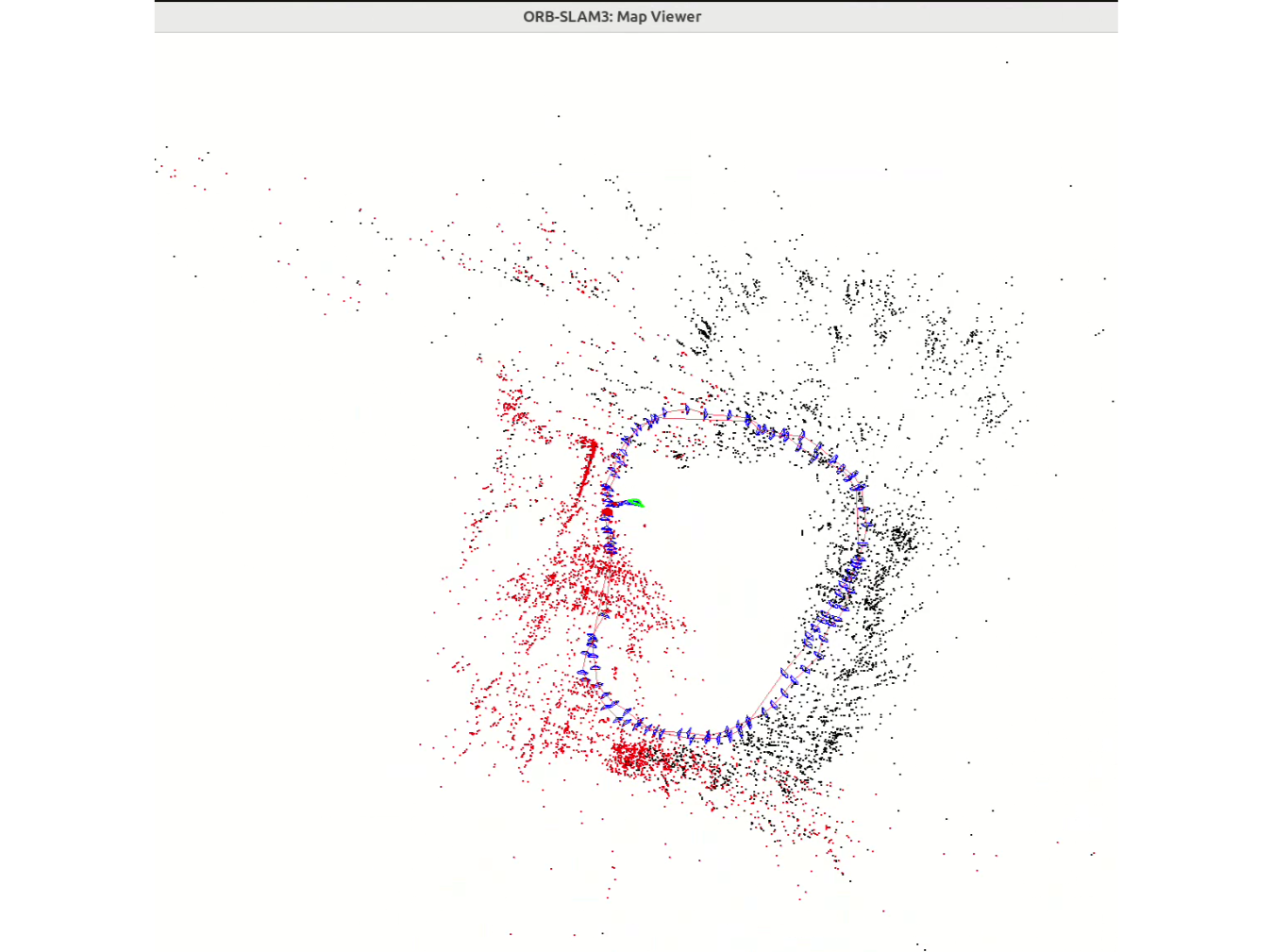
Traditional SLAM systems fail when objects move in the environment. Integrated Grounding DINO for open-vocabulary object detection with ORB-SLAM3 to filter dynamic objects in real-time using an Intel RealSense camera. Improved SLAM robustness by masking moving objects, enabling more reliable mapping for autonomous navigation.
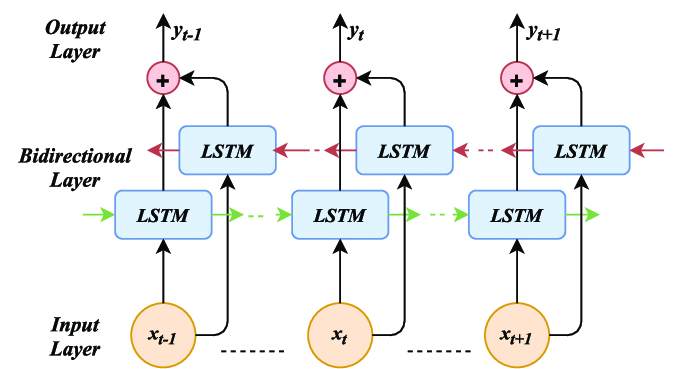
Identifying news sources requires understanding subtle linguistic patterns. Built and evaluated multiple text classification models from traditional ML (SVMs, Random Forest) to deep learning architectures (Bi-LSTM, GRU, DistilBERT). Achieved highest accuracy using a Bi-Directional Attention LSTM with GloVe embeddings, demonstrating the effectiveness of attention mechanisms for text understanding.
Feel free to reach out!